

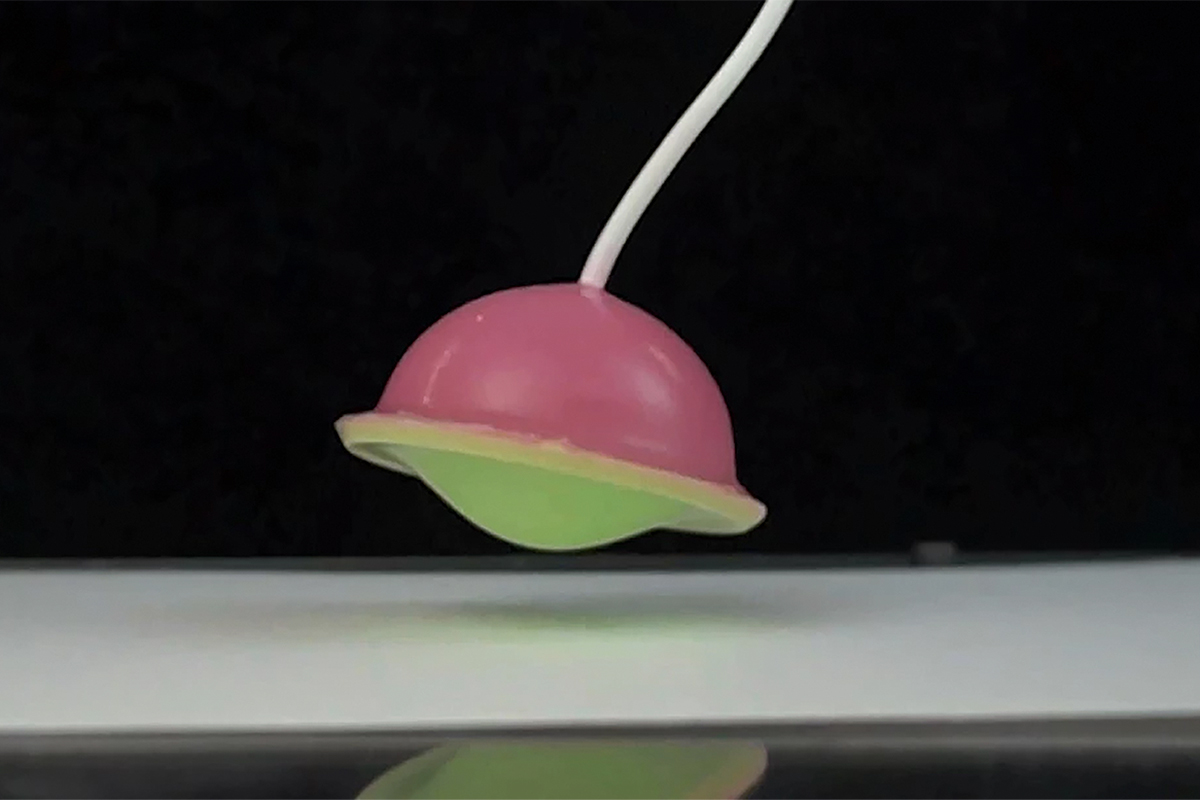
Le robot de David Mélançon utilise une instabilité structurelle pour sauter, un mouvement qui demande beaucoup d’énergie. Image: Groupe Bertoldi
Accepteriez-vous qu’un robot emballe ces gâteaux que vous avez mis des heures à décorer? Les robots «souples» se spécialisent dans les tâches délicates.
Oubliez tout ce que vous connaissez des robots : les lignes droites, les pièces métalliques, les gestes saccadés. L’objet que David Mélançon tient entre ses mains a plutôt l’air d’un jouet parfait pour calmer les poussées dentaires : une demi-sphère rose en caoutchouc sur une base vert lime. À l’aide d’un petit conduit qui surmonte le tout, le jeune chercheur y insuffle tranquillement de l’air. Puis, pop ! Tout d’un coup, la base verte se bombe, assez pour projeter l’objet en l’air. Il s’agit bien d’un robot sauteur, digne représentant d’une nouvelle catégorie d’automates : les robots souples !
Avant de comprendre l’utilité d’un tel acrobate, cernons le problème. La robotique classique, «c’est très précis, mais cela nécessite beaucoup de contrôle, dit le doctorant de l’Université Harvard. Il n’y a pas de place à l’erreur : s’il rencontre une nouveauté, le robot ne sait pas comment réagir. D’ailleurs, dans une chaîne de montage, on installe souvent une protection [une cloison] entre les humains et les robots».
La robotique souple, avec ses matériaux déformables, fait de la sécurité et de l’adaptation à l’environnement une priorité. Ces automates ressemblent davantage aux créations de la nature. Ils s’inspirent entre autres de l’agilité de la trompe d’éléphant, de la locomotion du serpent et de la propulsion par jet du calmar. Au lieu d’être activés par un moteur traditionnel, ces robots nouveau genre font appel à l’air, l’eau, l’huile, des gaz, la chaleur, la lumière, un changement de pH ou des ondes.
Commencer par ramper
Tout cela est encore très émergent; l’expression robot souple est apparue dans la littérature scientifique au début des années 2000. L’un des premiers modèles qui a marqué les esprits était une bibite à quatre pattes capable d’explorer le monde. Présentée en 2011, elle était aussi activée par un influx d’air : cinq conduits la pressurisaient et la dépressurisaient. Quand cette créature rencontrait un mur de verre suspendu à deux centimètres du sol, elle s’écrasait pour passer dessous.
Regarder la vidéo de présentation suffit toutefois à se convaincre que la vitesse n’est pas sa force. « Si l’on veut qu’un tel robot rampe très vite, il faut changer la pression d’air très rapidement : gonfler, dégonfler, regonfler, etc., indique David Mélançon. Dans mes travaux, je teste si un [apport d’air] lent peut provoquer un mouvement rapide. »
Son robot sauteur, décrit dans Science Robotics en 2020, prouve qu’une géométrie originale permet de contourner certaines limites. Des usages concrets pour ce genre de mécanismes sont envisageables : cette énergie soudaine pourrait aider un robot à sauter pour s’échapper d’une situation hasardeuse ou encore servirait un jour à réaliser certains prélèvements dans des vaisseaux fragiles.
Les usages médicaux sont régulièrement cités par les scientifiques du domaine. Par exemple, des chercheurs de Hong Kong ont mis au point un gant robotisé pour aider les patients à rééduquer leurs doigts après un accident vasculaire cérébral. De son côté, une équipe de l’Université de Sherbrooke a inventé un robot de plastique et de silicone qui effectue des biopsies de la prostate dans un appareil d’imagerie par résonance magnétique (dans lequel on ne peut introduire aucun objet métallique).
Flatter un chaton
Il existe aussi des hybrides dotés de composants souples et de composants rigides. C’est le cas du dispositif portatif qu’a construit Catherine Véronneau dans le cadre de son doctorat à l’Université de Sherbrooke. Dévoilé en 2020, il se porte à la taille et agit comme un troisième bras pour accomplir différentes tâches, comme tenir le fuselage d’un avion qui doit être fixé à l’aide de rivets. Une unité contenant le moteur y est reliée, suivant l’utilisateur comme un petit aspirateur au sol.
Attention, s’il a suffisamment de délicatesse pour cueillir des tomates, ce membre surnuméraire peut tout autant défaire un mur de gypse. « En robotique, on a toujours des compromis à faire entre la force et la douceur, rappelle-t-elle. Nous, on essaie de faire une pépine qui peut flatter un chaton ! »
Elle nous fait voir la main de plus près. « L’exosquelette noir est solide : il est fait de plastique imprimé en 3D. Mais l’intérieur des doigts est mou. C’est une matière qui ne prend pas d’expansion radialement, mais qui s’allonge dans l’axe du cylindre quand on met de la pression [ici de l’eau]. Le doigt n’a pas le choix de plier à cause de l’exosquelette autour. »
Pour éviter que l’utilisateur se voie chahuté au fil des gestes du bras robotisé, ses créateurs ont eu recours à des actionneurs particuliers : des embrayages magnétorhéologiques. Ces mécanismes logés avec le moteur sont remplis d’un mélange d’huile et de fer dont la viscosité s’ajuste grâce à un champ magnétique. Ils constituent une espèce de tampon entre le moteur et l’action du robot. « Si l’on avait choisi des actionneurs classiques et que le robot frappait dans le mur, je subirais le contrecoup : ça me ferait mal et je revolerais ! » mentionne Catherine Véronneau. Enfin, un peu de douceur dans ce monde de brutes !